
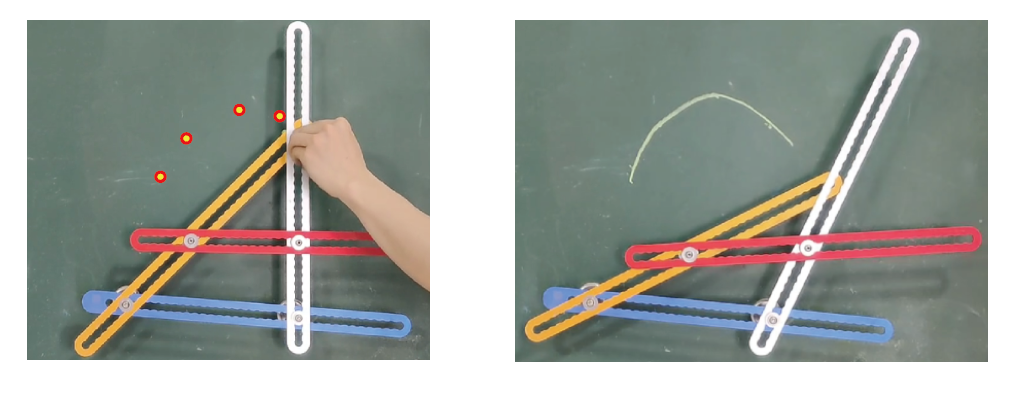
當互做(zuò)平面運動的兩個(gè)構件在一點上(shàng)相對速度為(wèi)零時(shí),這個(gè)點為(wèi)兩個(gè)構件的速度瞬心。在四連杆機構中兩個(gè)相對的連杆的速度瞬心是另外兩個(gè)連杆的交點。利用這個(gè)特性當一個(gè)連杆被固定時(shí)相對的一根連杆的絕對速度瞬心在另外兩根連杆的交點上(shàng)運動四連杆機構并且在另外兩根連杆的交點處打點,之後将點連成線就可(kě)以将速度瞬心的軌迹畫(huà)出來(lái)。

027-87869142
8:30-21:00(周一至周六)

